
")

Our research topics on Road Transportation
Cooperative control design for road vehicles
 Traffic efficiency and safety can be increased with coordination of the dynamics properties of the vehicles and vehicle groups. The communication between the vehicles and the effects of the information content for vehicles for trajectory design is also important beside the vehicle dynamics properties. The optimization of the vehicle dynamics properties can indirectly effect the efficiency of the transporting on local and global level, decrease the travel time and fuel consumption, resulting in the decrease of exhaust emission, having potential social impact.
Traffic efficiency and safety can be increased with coordination of the dynamics properties of the vehicles and vehicle groups. The communication between the vehicles and the effects of the information content for vehicles for trajectory design is also important beside the vehicle dynamics properties. The optimization of the vehicle dynamics properties can indirectly effect the efficiency of the transporting on local and global level, decrease the travel time and fuel consumption, resulting in the decrease of exhaust emission, having potential social impact.
The aim of the research is to design trajectories of vehicles considering the properties of the travelling vehicles and vehicle groups. During the elaboration of the control the sensitivity analysis of the method is also important. And finally the consideration of the differences form the normal operation (e.g. changes in road conditions and environmental conditions) and the effects of the failures is also an inevitable task to ensure feasibility.
Dr. Péter Gáspár
Energy-optimal adaptive cruise control design for road vehicles.
 The aim of the adaptive cruise control is to create optimal velocity profile in time on a distance-horizon with a space resolution based on the topographic conditions of the road (track, elevation data) and speed limits on the road. These conditions lead to a multiple criterion design task.
The aim of the adaptive cruise control is to create optimal velocity profile in time on a distance-horizon with a space resolution based on the topographic conditions of the road (track, elevation data) and speed limits on the road. These conditions lead to a multiple criterion design task.
The purpose of the research is to design an optimal energy adaptive cruise control with application of post-modern control theory. The increase of the reliability and the decrease of the energy demand take place in the multicriteria optimization. The algorithm must consider the available information from infrastructure and the other vehicles. For this task, the information from navigation map, and V2I and V2V communication has to taken into considerations besides the internal communication of the vehicle. During the design of the adaptive cruise control not only the restrictions of the speed limits of the infrastructure but the effect of other vehicles must be consdidereds.
Dr. Péter Gáspár
Robust modeling and control of urban traffic network
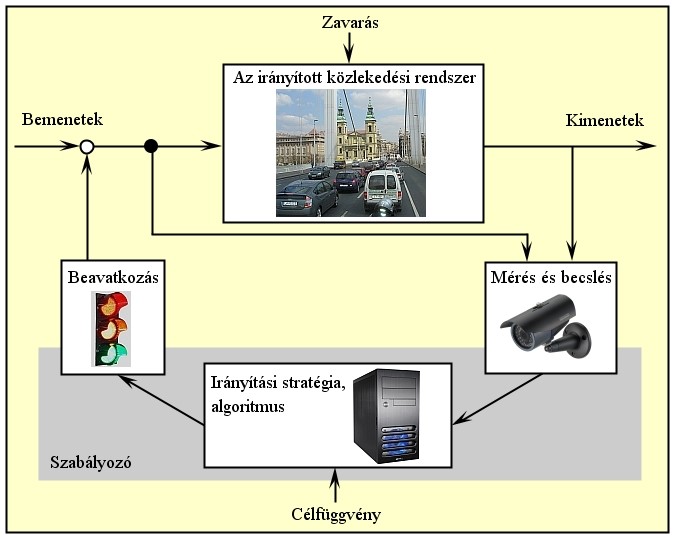 The growth of the motorization rate together with the external consequences generates real challenges for the traffic planners and traffic engineers. To assure the sustainable mobility as well a suitable life quality in cities a complex strategy and a network-wide traffic control are needed. If the states of the traffic network are known model-based control can be designed. A novel approach to the control of urban traffic with uncertainty is represented by the use of robust MPC (Model Predictive Control). Practically, the method consists of a minimax optimization process in a rolling-horizon framework (Löfberg, 2003). The minimax traffic control intends to minimize the vehicle queue length while the maximal potential ambiguity is also taken into account. The rolling-horizon framework means that controller predicts the states (queue lengths) and optimal control inputs for severeal sample times. Naturally, at the end of the given sample time only the green times of the first horizon are applied. Then, the system goes on for the next step and calculates repeatedly.
The growth of the motorization rate together with the external consequences generates real challenges for the traffic planners and traffic engineers. To assure the sustainable mobility as well a suitable life quality in cities a complex strategy and a network-wide traffic control are needed. If the states of the traffic network are known model-based control can be designed. A novel approach to the control of urban traffic with uncertainty is represented by the use of robust MPC (Model Predictive Control). Practically, the method consists of a minimax optimization process in a rolling-horizon framework (Löfberg, 2003). The minimax traffic control intends to minimize the vehicle queue length while the maximal potential ambiguity is also taken into account. The rolling-horizon framework means that controller predicts the states (queue lengths) and optimal control inputs for severeal sample times. Naturally, at the end of the given sample time only the green times of the first horizon are applied. Then, the system goes on for the next step and calculates repeatedly.
The robust MPC strategy presented above was validated by real-world traffic data with VISSIM traffic simulator. An improvement of ~10-30% in traffic parameters was achieved compared to the traditional control methods. A closed-loop traffic control can be realized which is able to provide optimal signal splits in a real-time fashion even if traffic disturbances are present. Therefore, the performance of the urban traffic can be increased and congestions avoided.
Dr. Tamás Tettamanti
Perimeter (gating) control for urban road traffic network
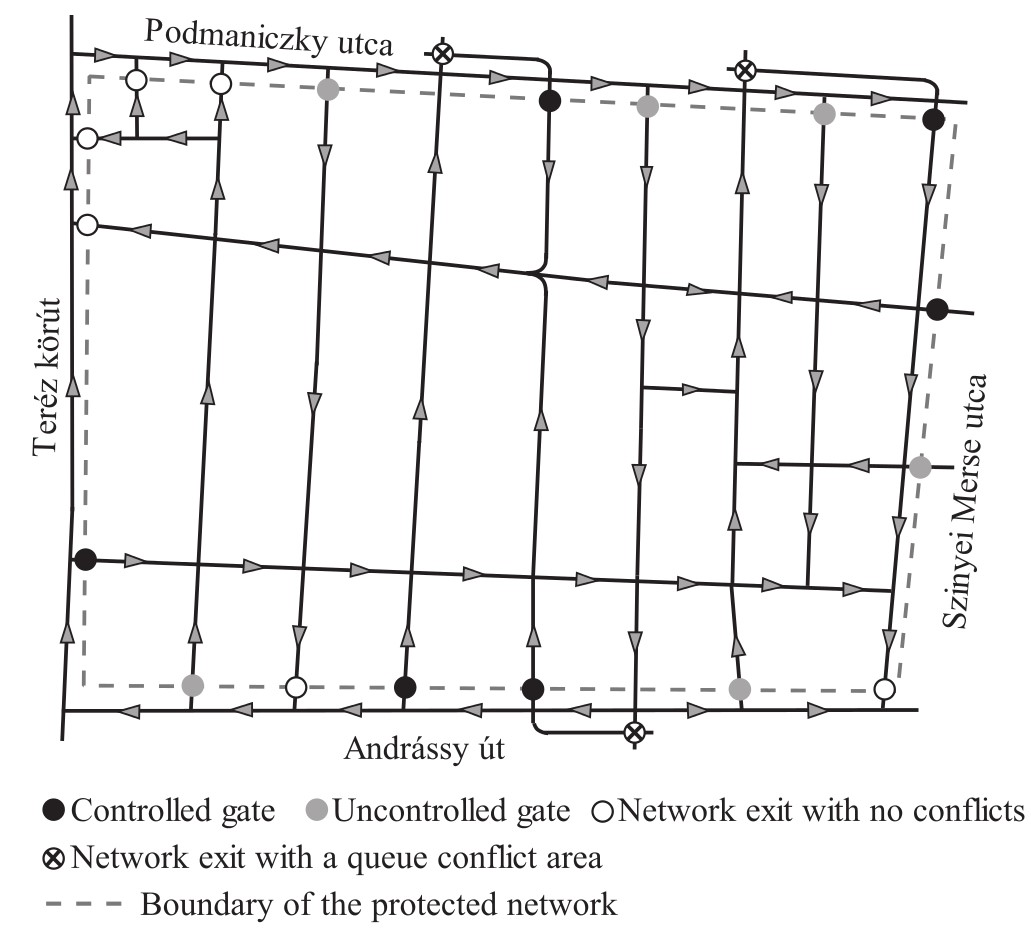 Perimeter control: an alternative traffic control concept to protect city center or a dense urban area against insatiate demands during rush hours. The optimization goal is to ensure stable and uncongested traffic in the protected network. Application of nonlinear Model Predictive Control based on the macroscopic fundamental diagram. In this concept, the control measures are performed by the traffic signal controllers at the boundary of the network.
Perimeter control: an alternative traffic control concept to protect city center or a dense urban area against insatiate demands during rush hours. The optimization goal is to ensure stable and uncongested traffic in the protected network. Application of nonlinear Model Predictive Control based on the macroscopic fundamental diagram. In this concept, the control measures are performed by the traffic signal controllers at the boundary of the network.
Dr. Tamás Tettamanti
Cellular Network Events for Traffic State Estimation
 The use of signaling events of the cellular network opens a way for road traffic estimation and modeling in a macro level. This can be realized as real-time algorithm providing a base for adaptive intelligent traffic management. The basic elements of cellular phone network are the cell (covered by the base station) and the Location Area (LA) combining several cells. The shape of them depends on several factors and is never circles exactly. Nevertheless, just for the better explanation: the radius of the cells is about a few hundred meters and the same of the LA is about a few kilometers in urban area.
The use of signaling events of the cellular network opens a way for road traffic estimation and modeling in a macro level. This can be realized as real-time algorithm providing a base for adaptive intelligent traffic management. The basic elements of cellular phone network are the cell (covered by the base station) and the Location Area (LA) combining several cells. The shape of them depends on several factors and is never circles exactly. Nevertheless, just for the better explanation: the radius of the cells is about a few hundred meters and the same of the LA is about a few kilometers in urban area.
Two characteristic events of the network are Handover (HO) and Location Area Update (LAU) which are generated by the transitions between the cells and LAs. HO occurs when the mobile phone is in call and changes the cell. LAU is generated by idle phones (not in calls) changing the LA. HO/LAU events are automatically stored by the operator of the telecommunication network through the base stations. Our research aim is to develop efficient algorithms which exploit the knowledge of HO/LAU events for traffic estimation.
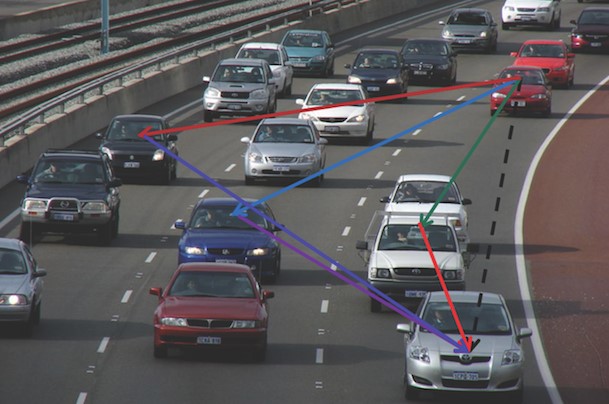
The mobile users create traces in the traffic network through their HO/LAU events depicted in. These data can be efficiently utilized in an aggregate way to estimate traffic even in real-time mode. The proposed method has two steps. First, a trip matrix of the traffic network must be created. Trip or OD (origin-destination) matrix determines the traffic flows between each OD pairs of the network.
OD matrix can be created through traditional methods (surveys) or by the appropriate use of the LAU events (Calabrese et al., 2011). The second step of the method consists of the traffic assignment which is generally applied based on OD matrix. Typically, traffic assignment is an optimization procedure which determines the route choices with traffic volumes between the OD pairs. The determination of the potential paths through traffic assignment is an easy task. However, the traffic volumes assigned to the paths may easily become inaccurate since assignment considers generally “only” the data of the OD matrix and the network topology. A potential solution to the reliability problem is given by the use of HO events. Although HOs are generated only by phones in call, by collecting all of them the typical traffic behaviors can be identified. Practically, the trajectories revealed through HOs can be fitted to the paths defined by the traffic assignment. Therefore, more accurate estimates are provided concerning the traffic volumes.
Dr. Tamás Tettamanti
Concept of Smart Signal Heads
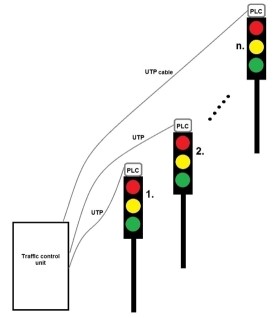 We are doing a project in our laboratory which called “Smart Signal Head” in road traffic signal control. The base of the idea is that we place a PLC (but it could be whatever computer unit) into the signal head which can switch the signal lamps bulbs and keep in touch with the remote control for further leading functions. The biggest advantage of the concept is that the huge quantity of the long, multi-wired cables can be replaced with one single UTP cable. Since the logical module is situated within the signal head, the cable connection between the signal head and the module means centimeters. This system results significant cost savings. Video link: http://player.vimeo.com/video/79551622
We are doing a project in our laboratory which called “Smart Signal Head” in road traffic signal control. The base of the idea is that we place a PLC (but it could be whatever computer unit) into the signal head which can switch the signal lamps bulbs and keep in touch with the remote control for further leading functions. The biggest advantage of the concept is that the huge quantity of the long, multi-wired cables can be replaced with one single UTP cable. Since the logical module is situated within the signal head, the cable connection between the signal head and the module means centimeters. This system results significant cost savings. Video link: http://player.vimeo.com/video/79551622
Dr. Tamás Tettamanti