
")






Meghívó Gáspár Péter székfoglaló előadására
A Magyar Tudományos Akadémia Műszaki Tudományok osztálya tisztelettel meghívja önt Gáspár Péter az MTA levelező tagja Járműorientált irányításelméleti kutatások címmel tartandó székfoglaló előadására.
Gáspár Péter az MTA levelező tagja székfoglalóját 2016. október 18-án, 15.00-tól tartja a Magyar Tudományos Akadémia Székházának Nagytermében. Forrás: MTA
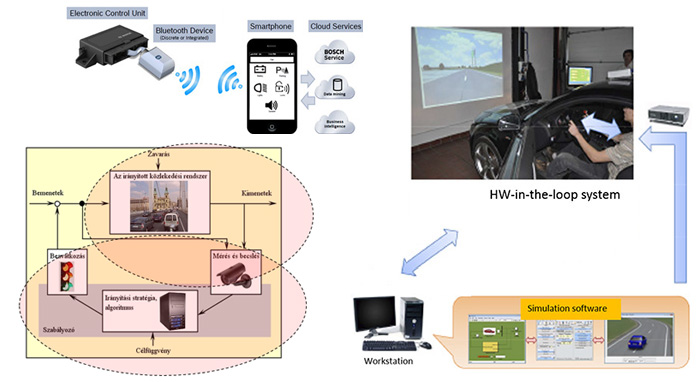
 A közlekedés meghatározó elemeinek, így a járműveknek és járműcsoportoknak az irányítása egymásra épülő hierarchikus szinteken történik. Az egyedi járművek esetén az irányítási módszerek célja komponensek és funkciók tervezése, az együttműködő járműcsoportok esetén pedig a kooperatív irányítástervezés. A járműorientált kutatás/fejlesztés az elektronikai és automatizálási funkciók alkalmazására, az érzékelők és beavatkozók teljesítménynövekedésére, az információs és kommunikációs technológiák lehetőségeire, valamint az elemzést és tervezést lehetővé tevő korszerű rendszer és irányítástechnika tudományos módszereire épül.
A közlekedés meghatározó elemeinek, így a járműveknek és járműcsoportoknak az irányítása egymásra épülő hierarchikus szinteken történik. Az egyedi járművek esetén az irányítási módszerek célja komponensek és funkciók tervezése, az együttműködő járműcsoportok esetén pedig a kooperatív irányítástervezés. A járműorientált kutatás/fejlesztés az elektronikai és automatizálási funkciók alkalmazására, az érzékelők és beavatkozók teljesítménynövekedésére, az információs és kommunikációs technológiák lehetőségeire, valamint az elemzést és tervezést lehetővé tevő korszerű rendszer és irányítástechnika tudományos módszereire épül.
A kutatásokban fontos szerepet kapnak a modell alapú robusztus irányítástervezési elvek. Ezek magukban foglalják a Newton/Lagrange formalizmusra építő dinamikai mozgásleírást, a minőségi specifikációkat és a modell bizonytalanságokat figyelembe vevő irányítási célú modellezést, továbbá az ezekre épülő modellosztályokra kidolgozott irányítástervezési módszereket. A kutatásokban a bizonytalanságokat figyelembe venni képes lineáris időinvariáns modelleket, valamint a nemlinearitások kezelésére is alkalmas állapot vagy paraméterfüggő lineáris változó paraméterű modellosztályokat alkalmaztunk. A járműorientált mérnöki feladatokban a minőségi specifikációk általában együttesen nem optimalizálhatók, ezért közöttük megfelelően megválasztott súlyozó függvények tervezésével kompromisszumokat kell keresni. Ezért a minőségi követelményeket garantáló, bizonytalanságokat és zavarásokat figyelembe vevő robusztus irányítástervezési módszereket kell alkalmaznunk.
A járműorientált irányításelméleti kutatások sarkalatos elemeit négy fő részben - egyedi, integrált, kooperatív és autonóm járműirányítások – tárgyaljuk.
1./ Az egyedi járművek irányítási feladatai a komponensek és funkciók javítására, hatékonyságának növelésére irányulnak. Ezek az elméleti és gyakorlati kihívások gyakorta vezetnek új tervezési módszerekhez, algoritmusokhoz. A integrált járműirányítás alapvető célja az erőforrások (érzékelők, beavatkozók, lokális irányítások) összehangolása, az egymástól függetlenül tervezett egyedi irányítások közötti kölcsönhatások kezelése.
2./ Az integrált irányítástervezésben biztosítani kell a járműállapotoktól függő prioritást, azaz a beavatkozók közötti hierarchiát. Az előadás kidolgozott módszereket mutat be a megváltozott körülményekhez való adaptálódást rekonfiguráló irányítással, valamint egy komponens meghibásodásának következményeihez való alkalmazkodást hibatűrő irányítással kezelő tervezési stratégiákra.
3./ A kooperatív irányítás célkitűzése járműcsoportok irányításának összehangolása egy globális célkitűzés megvalósítása érdekében (például károsanyag kibocsátás csökkentése, üzemanyagfogyasztás minimalizálása). A megoldási javaslatok ismertetése során kitérünk a járművezető és a jármű közötti interakcióra egy vezetői modell bemutatásával, valamint a jármű és a környezet közötti kölcsönhatásokra is egy optimális sebességtervező ismertetésével.
4./ A legújabb kutatási célkitűzések közül kiemelkedik az autonóm járműirányítás. A jármű és környezet közötti kölcsönhatás megítélésében a környezetdetektálási és szituáció értékelési módszerek játszanak fontos szerepet. Az irányítástervezés során az előírt, illetve az esetlegesen módosult szituációhoz adaptálódó trajektória követését kell biztosítani. Az előadásban a tervezési módszerek illusztrálására nagyszámú példát is bemutatunk.